








Witam.
Pisał Pan, że boi się Pan zaryć LA-lunią w dno. Jest na to metoda a mianowicie pitch controller czyli serwo poziomica. To małe ustrojstwo podłączone do serwa działające na zasadzie żyroskopu. Widziałem to do kupienia na sklepach zagranicznych, kosztowało ok 20 euro, nie wiem jak teraz. Gdy model się przechyla to urządzenie odpowiednio ustawia przednie bądź tylne stery głębokości i wyrównuje okręt. Oczywiście sygnał z aparatury jest nadrzędny. Może udałoby się Panu takie coś "wyskrobać".
Pozdrawiam.
SSN-688
-
Andrzej1

- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
cesiek2 napisał:
Witam Cię Ceśku2
Nigdzie nie pisałem, że boję się zaryć LA w dno. Pisałem, że mi się to nie podoba, a to różne rzeczy.
Jakbyś przeczytał, ze zrozumieniem, parę kolejnych postów, to byś wiedział, że na pokładzie znajduje się
inklinometr (uruchomiony zresztą). To jest ta właśnie ona poziomnica. Wielkie ustrojstwo to nie jest.
Innymi słowy : takie cóś jest już "wyskrobane" (a nawet wlutowane i uruchomione).
Z ukłonami
Andrzej Korycki
P.S.
Ponawiam pytanie RomkaS (w nieco innej formie ) :
gdzie Twój model ?
Witam.
Pisał Pan, że boi się Pan zaryć LA-lunią w dno. Jest na to metoda a mianowicie pitch controller czyli serwo poziomica. To małe ustrojstwo podłączone do serwa działające na zasadzie żyroskopu. Widziałem to do kupienia na sklepach zagranicznych, kosztowało ok 20 euro, nie wiem jak teraz. Gdy model się przechyla to urządzenie odpowiednio ustawia przednie bądź tylne stery głębokości i wyrównuje okręt. Oczywiście sygnał z aparatury jest nadrzędny. Może udałoby się Panu takie coś "wyskrobać".
Pozdrawiam.
Witam Cię Ceśku2
Nigdzie nie pisałem, że boję się zaryć LA w dno. Pisałem, że mi się to nie podoba, a to różne rzeczy.
Jakbyś przeczytał, ze zrozumieniem, parę kolejnych postów, to byś wiedział, że na pokładzie znajduje się
inklinometr (uruchomiony zresztą). To jest ta właśnie ona poziomnica. Wielkie ustrojstwo to nie jest.
Innymi słowy : takie cóś jest już "wyskrobane" (a nawet wlutowane i uruchomione).
Z ukłonami
Andrzej Korycki
P.S.
Ponawiam pytanie RomkaS (w nieco innej formie ) :
gdzie Twój model ?
-
RomekS

- Posty: 3211
- Rejestracja: 04 gru 2010, 21:55
- Lokalizacja: {"name":"Polska Toru\u0144","desc":"","lat":"","lng":""}
O:SSN-688
Andrzej1 napisał:
Otóż teraz mam bardzo fajny model ...
Nowa Honda Civic 1,4i-VTEC (100KM) M5 Sport 5d.
I ta mi zabiera cały czas.
Jest w skali 1:1, i zajęła mi cały garaż.
.........Moje modele na razie są" w odstawce".
xxx
Po obejrzeniu można wykasować... fotki.
P.S.
Ponawiam pytanie RomkaS (w nieco innej formie ) :
gdzie Twój model ?
Otóż teraz mam bardzo fajny model ...
Nowa Honda Civic 1,4i-VTEC (100KM) M5 Sport 5d.
I ta mi zabiera cały czas.
Jest w skali 1:1, i zajęła mi cały garaż.
.........Moje modele na razie są" w odstawce".
xxx
Po obejrzeniu można wykasować... fotki.
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
RomekS napisał:
Witaj Romku
Ja nie pytałem o Twój model, tylko o model Ceśka. Powtórzyłem Twoje pytanie o dżonkę.
A tak, swoją drogą, to zbieżność dat wydania córki i zakupu auta jest całkiem przypadkowa ?
Za taką córkę ..... .
Z ukłonami
Andrzej Korycki
P.S.
Dobrze, że czerwone - czerwone mało palą.
Andrzej1 napisał:P.S.
Ponawiam pytanie RomkaS (w nieco innej formie ) :
gdzie Twój model ?
Otóż teraz mam bardzo fajny model ...
Nowa Honda Civic 1,4i-VTEC (100KM) M5 Sport 5d.
I ta mi zabiera cały czas.
Jest w skali 1:1, i zajęła mi cały garaż.
.........Moje modele na razie są" w odstawce".
...
Witaj Romku
Ja nie pytałem o Twój model, tylko o model Ceśka. Powtórzyłem Twoje pytanie o dżonkę.
A tak, swoją drogą, to zbieżność dat wydania córki i zakupu auta jest całkiem przypadkowa ?
Za taką córkę ..... .
Z ukłonami
Andrzej Korycki
P.S.
Dobrze, że czerwone - czerwone mało palą.
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
Witam
Z rana pojawiła się Gura Procesorowa. Przywiezła ze sobą zbiornik, który uprzednio zabrała, ze zrobioną
nową elektroniką. Ponieważ ta Gura jest wulkanem, to prawie wybuchła gdy zwiedziała się, że zabiłem
kolejne elementy na płytce. Wymieniła tranzystory, na takie, które można zabić tylko młotkiem.
Jeżeli je zabiję to muszę być młotkiem.
W tym momencie należą sie podziękowania Gurze : dziękuję Ci Andrzeju, bez Ciebie LAla by nie
powstała.
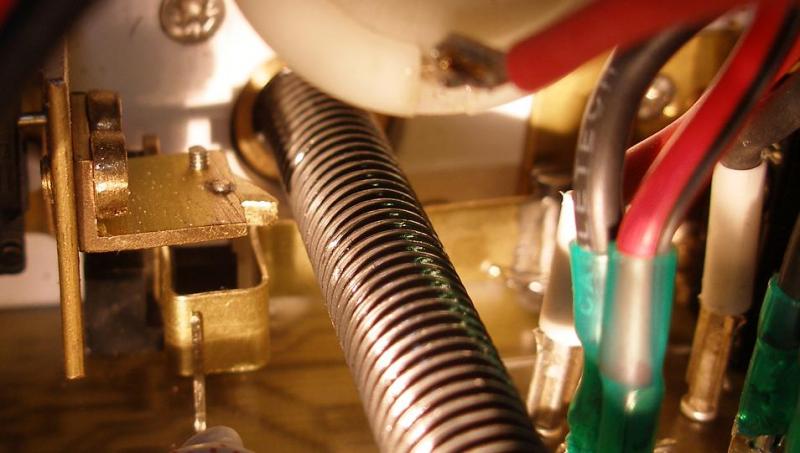
Poza wszystkiem, został dorobiony (w całości) przez Gurę drugi wyłącznik krańcowy (tą razą apteczny,
przepraszam, optyczny ). Wyłącznik ten działa na 1mm wcześniej niż wyłącznik z trójkątem Teosa.
A, właśnie : gdzie jest Teos ?.
Procesor dostaje sumę logiczną z obu wyłączników. Teraz już mam trzy wyłączniki i jeden bit.
Jak tylko skończę pracę rzucę się do niszczenia weeckendowej krwawicy Gury.
To co pojawiło się rano wygląda z góry tak :
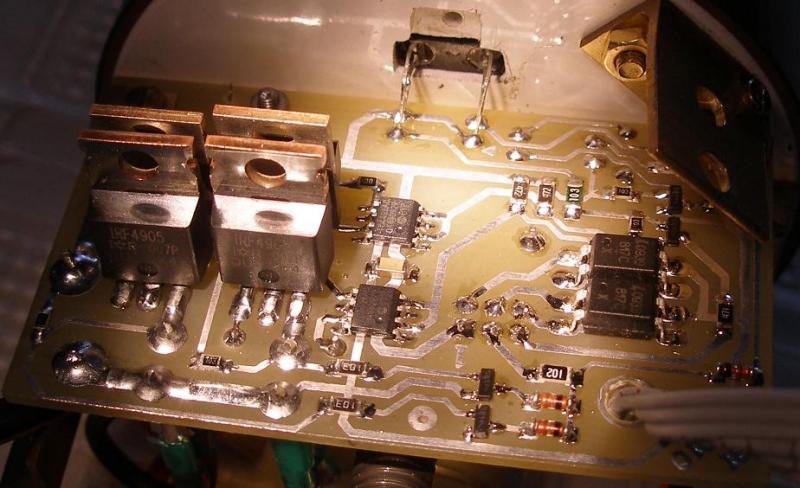
a pod haleczką :
Jeżeli ktoś narzeka, że pod haleczką nic nie widać, to fee - nie należało tam zaglądać.
A na serio, to zrobiłem z 10 zdjęć i na tym "nie widać" najlepiej. Wszystkie inne były gorsze.
Z ukłonami
Andrzej Korycki
Z rana pojawiła się Gura Procesorowa. Przywiezła ze sobą zbiornik, który uprzednio zabrała, ze zrobioną
nową elektroniką. Ponieważ ta Gura jest wulkanem, to prawie wybuchła gdy zwiedziała się, że zabiłem
kolejne elementy na płytce. Wymieniła tranzystory, na takie, które można zabić tylko młotkiem.
Jeżeli je zabiję to muszę być młotkiem.
W tym momencie należą sie podziękowania Gurze : dziękuję Ci Andrzeju, bez Ciebie LAla by nie
powstała.
Poza wszystkiem, został dorobiony (w całości) przez Gurę drugi wyłącznik krańcowy (tą razą apteczny,
przepraszam, optyczny ). Wyłącznik ten działa na 1mm wcześniej niż wyłącznik z trójkątem Teosa.
A, właśnie : gdzie jest Teos ?.
Procesor dostaje sumę logiczną z obu wyłączników. Teraz już mam trzy wyłączniki i jeden bit.
Jak tylko skończę pracę rzucę się do niszczenia weeckendowej krwawicy Gury.
To co pojawiło się rano wygląda z góry tak :
a pod haleczką :
Jeżeli ktoś narzeka, że pod haleczką nic nie widać, to fee - nie należało tam zaglądać.
A na serio, to zrobiłem z 10 zdjęć i na tym "nie widać" najlepiej. Wszystkie inne były gorsze.
Z ukłonami
Andrzej Korycki
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
Witam
Oto przyczynek do dyskusji, jak LA ma rozmieszczone zbiorniki balastowe.
Ja tam ich nie widzę wcale.
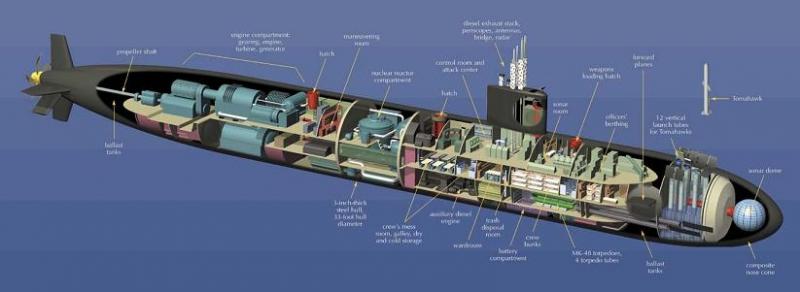
Po dokładnym obejrzeniu rysunku znalazłem (na dnie) (na dziobie i rufie).
Czarne obszary wskazywane strzałkami to zbiorniki balastowe.
Z ukłonami
Andrzej Korycki
Oto przyczynek do dyskusji, jak LA ma rozmieszczone zbiorniki balastowe.
Ja tam ich nie widzę wcale.
Po dokładnym obejrzeniu rysunku znalazłem (na dnie) (na dziobie i rufie).
Czarne obszary wskazywane strzałkami to zbiorniki balastowe.
Z ukłonami
Andrzej Korycki
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
Witam
Tą razą taki kawałek programu :
[code:1]
for(;;ÂŤÂť)
{
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
KierunekObrotowSilnikaZbiornika( ZBIORNIK_RUFOWY, NAPELNIAJ_ZBIORNIK );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOn( ZBIORNIK_RUFOWY );
SetSilnikZbiornikaBusy( ZBIORNIK_RUFOWY, 100 );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
while( !KrancowkaSilnikaZbiornika( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOff( ZBIORNIK_RUFOWY );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
KierunekObrotowSilnikaZbiornika( ZBIORNIK_RUFOWY, OPROZNIAJ_ZBIORNIK );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOn( ZBIORNIK_RUFOWY );
SetSilnikZbiornikaBusy( ZBIORNIK_RUFOWY, 100 );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
while( !KrancowkaSilnikaZbiornika( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOff( ZBIORNIK_RUFOWY );
}
[/code:1]
Wspomagany taką oto elektroniką :
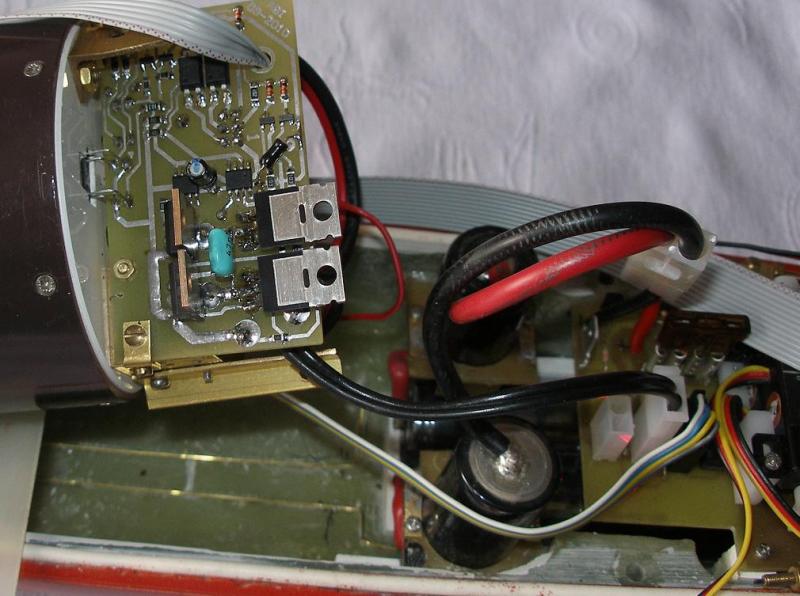
oraz 5 minutami nieustannej pracy zbiornika zrobił z tego co po lewej to co po prawej :

Wibrator nie wytrzymał ale elektronika już tak. Widać wibracje za duże były.
Wszystkie elementy elektroniczne były zimne, tłok chodził jak ta lala aż się ucho urwało.
PWM do serwa zaworu napowietrzania też chodzi.
Po remoncie zbiornika powracam do dalszych prób.
Z ukłonami
Andrzej Korycki
Tą razą taki kawałek programu :
[code:1]
for(;;ÂŤÂť)
{
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
KierunekObrotowSilnikaZbiornika( ZBIORNIK_RUFOWY, NAPELNIAJ_ZBIORNIK );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOn( ZBIORNIK_RUFOWY );
SetSilnikZbiornikaBusy( ZBIORNIK_RUFOWY, 100 );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
while( !KrancowkaSilnikaZbiornika( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOff( ZBIORNIK_RUFOWY );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
KierunekObrotowSilnikaZbiornika( ZBIORNIK_RUFOWY, OPROZNIAJ_ZBIORNIK );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOn( ZBIORNIK_RUFOWY );
SetSilnikZbiornikaBusy( ZBIORNIK_RUFOWY, 100 );
while( IsSilnikZbiornikaBusy( ZBIORNIK_RUFOWY ) );
while( !KrancowkaSilnikaZbiornika( ZBIORNIK_RUFOWY ) );
SilnikZbiornikaOff( ZBIORNIK_RUFOWY );
}
[/code:1]
Wspomagany taką oto elektroniką :
oraz 5 minutami nieustannej pracy zbiornika zrobił z tego co po lewej to co po prawej :
Wibrator nie wytrzymał ale elektronika już tak. Widać wibracje za duże były.
Wszystkie elementy elektroniczne były zimne, tłok chodził jak ta lala aż się ucho urwało.
PWM do serwa zaworu napowietrzania też chodzi.
Po remoncie zbiornika powracam do dalszych prób.
Z ukłonami
Andrzej Korycki
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
Witam
Zbiornik wyremontowany i uruchomiony. Pozostało jeszcze zliczanie
impulsów na kole. Dziś się tym zajmę.
A wczoraj ... :
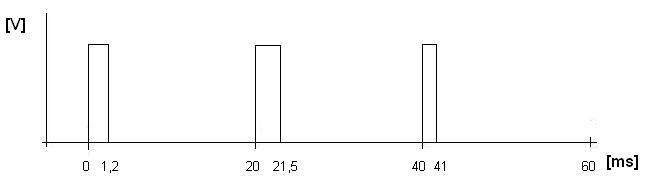
Tym razem trochę o sterowaniu serwami modelarskimi (analogowymi).
Sterowanie odbywa się za pomocą PWM (Pulse Width Modulation).
Tłumacząc to na ludzki : zmienna szerokość impulsu.
Okres wynosi 20 milisekund (20 * 1/1000) czyli 50Hz. Standardowo serwo wychyla się około 90
stopni gdy długość impulsu napięcia zmienia się od 1 do 2 milisekund.
Mikrokontroler ATmega32 ma fantastyczne możliwości generowania takich przebiegów.
Tą razą jednak, okazało się, że przy kwarcu 16Mhz nie można dobrać żadnych danych tak,
aby timer2 generował przebieg nadający się do sterowania serwem ciągającym
stery głębokości na kiosku. Ciągle wychodziło 61 Hz. Po różnych rozpaczliwych próbach polegających
między innymi na dzieleniu liczby 16 000 000 przez 256 lub 510, postanowiłem
zrealizować to, czego się nie da automatycznie, za pomocą programu.
I tak, założyłem, że stery na kiosku będą rozróżniać po 6 położeń w każdym kierunku.
45stopni/6 = 7,5 stopna. Przy przełożeniu mniejszym od 1 wyjdzie cóś ze trzy stopnie.
Na razie wydaje się to wystarczające. W końcu i tak tego widać nie będzie, bo stery na kiosku
będą się ruszać wyłącznie w stanie zanurzony. Musiałem użyć Timera2, bo wszystko inne jest
już zajęte.
Umyśliłem generowanie przerwań od timera co 0,1 ms. Gdy się okaże, że stanowią zbyt duże obciążenie dla procesora, to w okresie od 0 do 2ms będą generowane co 0,1ms a od 2ms do 20ms co 1ms albo jeszcze rzadziej.
Serwo zachowuje się ok. A teraz stosowny kawałek programu :
Inicjalizacja timerów i dopuszczenie przerwań od nich :
[code:1]
// Inicjalizacja Timera2 do generowania PWM
// przerwania co 0,1ms preskaler 64
TCCR2 = 0b00000100;
TCNT2 = 256 - 25;
TIMSK |= _BV( TOIE0 ) | _BV( TOIE1 ) | _BV( TOIE2 );
[/code:1]
Funkcja obsługująca przerwania od timera2 :
[code:1]
unsigned char intT2period = 0; //liczy do 200
volatile unsigned char intT2Pulselength = 15;
volatile unsigned char inT2Counter = 0;
SIGNAL(SIG_OVERFLOW2)
{
// TCNT2 musi być przeladowywany
// Timer tyka zgodnie z zaprogramowanymi wartosciami
// Przy kazdym tyknieciu zwieksza TCNT2.
// Przy osiagnieciu 0xFF generowane jest to przerwanie
TCNT2 = 256 - 25;
if ( ++intT2period <= 23 )
{
if ( ++inT2Counter <= intT2Pulselength )
{
PORTD |= _BV( Servo_SterK );
}
else
{
PORTD &= ~_BV( Servo_SterK );
}
}
else if ( intT2period > 199 )
{
intT2period = 0;
inT2Counter = 0;
}
}
[/code:1]
Funkcja ta odpowiedzialna jest za generowanie owego krótkiego impulsu
o regulowanej długości od 0,9 ms do 2,1 ms.
I wreszcie funkcja zmieniająca położenie serwa :
[code:1]
// Ustawia dlugosc wystawianego impulsu na 9 do 21
// Uzywane do sterowania sterow poziomych
void SetPulseIntT2Length( unsigned char length )
{
if ( ( length > 8 ) && ( length < 22 ) )
{
intT2Pulselength = length;
}
}
[/code:1]
Na razie nie dostosowane do faktycznego wychylenia sterów, ale to już drobiazg.
Pozostał timer1, który ma dawać dwa przebiegi PWM : do sterowania silnikiem głównym i
sterami głębokości na rufie.
Z ukłonami
Andrzej Korycki
Zbiornik wyremontowany i uruchomiony. Pozostało jeszcze zliczanie
impulsów na kole. Dziś się tym zajmę.
A wczoraj ... :
Tym razem trochę o sterowaniu serwami modelarskimi (analogowymi).
Sterowanie odbywa się za pomocą PWM (Pulse Width Modulation).
Tłumacząc to na ludzki : zmienna szerokość impulsu.
Okres wynosi 20 milisekund (20 * 1/1000) czyli 50Hz. Standardowo serwo wychyla się około 90
stopni gdy długość impulsu napięcia zmienia się od 1 do 2 milisekund.
Mikrokontroler ATmega32 ma fantastyczne możliwości generowania takich przebiegów.
Tą razą jednak, okazało się, że przy kwarcu 16Mhz nie można dobrać żadnych danych tak,
aby timer2 generował przebieg nadający się do sterowania serwem ciągającym
stery głębokości na kiosku. Ciągle wychodziło 61 Hz. Po różnych rozpaczliwych próbach polegających
między innymi na dzieleniu liczby 16 000 000 przez 256 lub 510, postanowiłem
zrealizować to, czego się nie da automatycznie, za pomocą programu.
I tak, założyłem, że stery na kiosku będą rozróżniać po 6 położeń w każdym kierunku.
45stopni/6 = 7,5 stopna. Przy przełożeniu mniejszym od 1 wyjdzie cóś ze trzy stopnie.
Na razie wydaje się to wystarczające. W końcu i tak tego widać nie będzie, bo stery na kiosku
będą się ruszać wyłącznie w stanie zanurzony. Musiałem użyć Timera2, bo wszystko inne jest
już zajęte.
Umyśliłem generowanie przerwań od timera co 0,1 ms. Gdy się okaże, że stanowią zbyt duże obciążenie dla procesora, to w okresie od 0 do 2ms będą generowane co 0,1ms a od 2ms do 20ms co 1ms albo jeszcze rzadziej.
Serwo zachowuje się ok. A teraz stosowny kawałek programu :
Inicjalizacja timerów i dopuszczenie przerwań od nich :
[code:1]
// Inicjalizacja Timera2 do generowania PWM
// przerwania co 0,1ms preskaler 64
TCCR2 = 0b00000100;
TCNT2 = 256 - 25;
TIMSK |= _BV( TOIE0 ) | _BV( TOIE1 ) | _BV( TOIE2 );
[/code:1]
Funkcja obsługująca przerwania od timera2 :
[code:1]
unsigned char intT2period = 0; //liczy do 200
volatile unsigned char intT2Pulselength = 15;
volatile unsigned char inT2Counter = 0;
SIGNAL(SIG_OVERFLOW2)
{
// TCNT2 musi być przeladowywany
// Timer tyka zgodnie z zaprogramowanymi wartosciami
// Przy kazdym tyknieciu zwieksza TCNT2.
// Przy osiagnieciu 0xFF generowane jest to przerwanie
TCNT2 = 256 - 25;
if ( ++intT2period <= 23 )
{
if ( ++inT2Counter <= intT2Pulselength )
{
PORTD |= _BV( Servo_SterK );
}
else
{
PORTD &= ~_BV( Servo_SterK );
}
}
else if ( intT2period > 199 )
{
intT2period = 0;
inT2Counter = 0;
}
}
[/code:1]
Funkcja ta odpowiedzialna jest za generowanie owego krótkiego impulsu
o regulowanej długości od 0,9 ms do 2,1 ms.
I wreszcie funkcja zmieniająca położenie serwa :
[code:1]
// Ustawia dlugosc wystawianego impulsu na 9 do 21
// Uzywane do sterowania sterow poziomych
void SetPulseIntT2Length( unsigned char length )
{
if ( ( length > 8 ) && ( length < 22 ) )
{
intT2Pulselength = length;
}
}
[/code:1]
Na razie nie dostosowane do faktycznego wychylenia sterów, ale to już drobiazg.
Pozostał timer1, który ma dawać dwa przebiegi PWM : do sterowania silnikiem głównym i
sterami głębokości na rufie.
Z ukłonami
Andrzej Korycki
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
Witam
Ostatni meldunek z placu boju z oporną materią przed wyjazdem na wywczasy.
Napisałem program, który realizuje następujące funkcje :
1. Mruga niebieskim ledem
2. Inicjuje zbiornik
3. Zamyka zawór
4. Przesuwa zbiornik o 200 impulsów w kierunku nabierania wody
5. Otwiera zawór
6. Zapamiętuje wskazanie inkilinometru (domyślnie poziom)
W pętli :
7. Na zmianę wskazań inklinometru reaguje zmianą położenia tłoka w zbiorniku
8. Na zmianę wskazań inklinometru reaguje sterami na kiosku
9. Gdy okręt w wodzie, to zamyka zawór napowietrzania
10. Zapala po kolei ledy na rufie (oprócz czerwonego)
11. Gdy woda na pokładzie to zatrzymuje program i zapala ledy biały i zielony na stale.
I kończy działanie pętli.
12. Cały czas nadzorowane jest napięcie zasilania modułów mocy. Gdy spadnie
to zacznie mrugać czerwony led na rufie.
Do podrasowania pozostały impulsy sterowania serwem sterów kiosku.
Serwo trochę szarpie. Ale tu wymagany jest oscyloskop.
Pozostałe rzeczy już działają. Timer1 wciąż czeka.
Do usłyszenia po 25 października.
Z ukłonami
Andrzej Korycki
Ostatni meldunek z placu boju z oporną materią przed wyjazdem na wywczasy.
Napisałem program, który realizuje następujące funkcje :
1. Mruga niebieskim ledem
2. Inicjuje zbiornik
3. Zamyka zawór
4. Przesuwa zbiornik o 200 impulsów w kierunku nabierania wody
5. Otwiera zawór
6. Zapamiętuje wskazanie inkilinometru (domyślnie poziom)
W pętli :
7. Na zmianę wskazań inklinometru reaguje zmianą położenia tłoka w zbiorniku
8. Na zmianę wskazań inklinometru reaguje sterami na kiosku
9. Gdy okręt w wodzie, to zamyka zawór napowietrzania
10. Zapala po kolei ledy na rufie (oprócz czerwonego)
11. Gdy woda na pokładzie to zatrzymuje program i zapala ledy biały i zielony na stale.
I kończy działanie pętli.
12. Cały czas nadzorowane jest napięcie zasilania modułów mocy. Gdy spadnie
to zacznie mrugać czerwony led na rufie.
Do podrasowania pozostały impulsy sterowania serwem sterów kiosku.
Serwo trochę szarpie. Ale tu wymagany jest oscyloskop.
Pozostałe rzeczy już działają. Timer1 wciąż czeka.
Do usłyszenia po 25 października.
Z ukłonami
Andrzej Korycki
-
Andrzej1
- Posty: 1568
- Rejestracja: 04 gru 2010, 21:56
- Lokalizacja: {"name":"Polska Szczecin","desc":"","lat":"","lng":""}
O:SSN-688
Witam
Oscyloskop wykazał, że impulsy sterujące serwem sterów kiosku są idealne a "ścierwo" szarpie.
Z trzech serw HS125MG nie szarpało tylko jedno.
Zaistniało nieśmiałe podejrzenie, że napięcie sterujące serwem (impulsy) jest za duże (7,2V).
Trwają prace nad obniżeniem napięcia do 5-6 voltów.
Czy może ktoś coś wie na ten temat ?
Dotarcie do strony Hiteca, gdzie podejrzewałem dane techniczne serwa, okazało się na razie niemożliwe.
Z ukłonami
Andrzej Korycki
Oscyloskop wykazał, że impulsy sterujące serwem sterów kiosku są idealne a "ścierwo" szarpie.
Z trzech serw HS125MG nie szarpało tylko jedno.
Zaistniało nieśmiałe podejrzenie, że napięcie sterujące serwem (impulsy) jest za duże (7,2V).
Trwają prace nad obniżeniem napięcia do 5-6 voltów.
Czy może ktoś coś wie na ten temat ?
Dotarcie do strony Hiteca, gdzie podejrzewałem dane techniczne serwa, okazało się na razie niemożliwe.
Z ukłonami
Andrzej Korycki