O:SSN-688
: 23 wrz 2010, 15:05
Dziędobry - no taki sobie
Program rewelacyjny, po prostu pierwsza klasa. Potrafi wiele.
Po pierwsze primo : znów rozwalił tranzystory, a po drugie primo
nadwyrężył wyłączniki krańcowe w kierunku opróżniania. O ile tranzystory mnie martwią mniej, bo tym już
się martwi Gura Procesorowa a jeden martwiący się to wystarczy w zupełności, to wyłącznik krańcowy
martwi mnie więcej, bo tym się martwię tylko ja.
Wyłącznik krańcowy wyglądał tak :
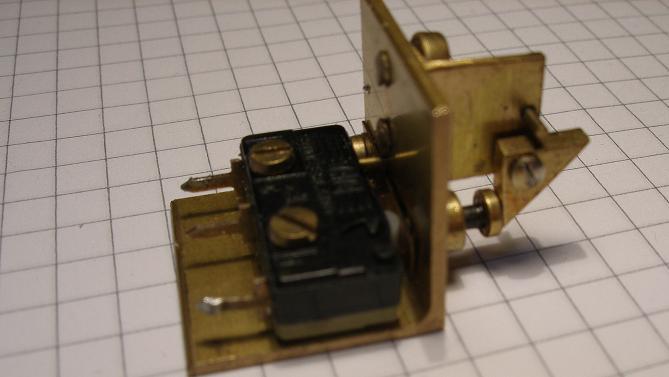
Poprzez trójkąt Teosa ( gdzie jest Teos ? ) popychany był pręt węglowy zaopatrzony w talerzyk i tulejkę
ograniczającą ruch. Wszystko to pchało blaszkę, która bezpośrednio atakowała wyłącznik krańcowy za złotych piętnaście (cztery razy tyle co tranzystor).
Jak tłok pojechał troszku dalej, to wyłącznik się rokraczał i już. Zresztą, przy takiej sile nacisku,
każdy by się rozkraczył (jak ta wrona).
Teraz zrobiłem tak :
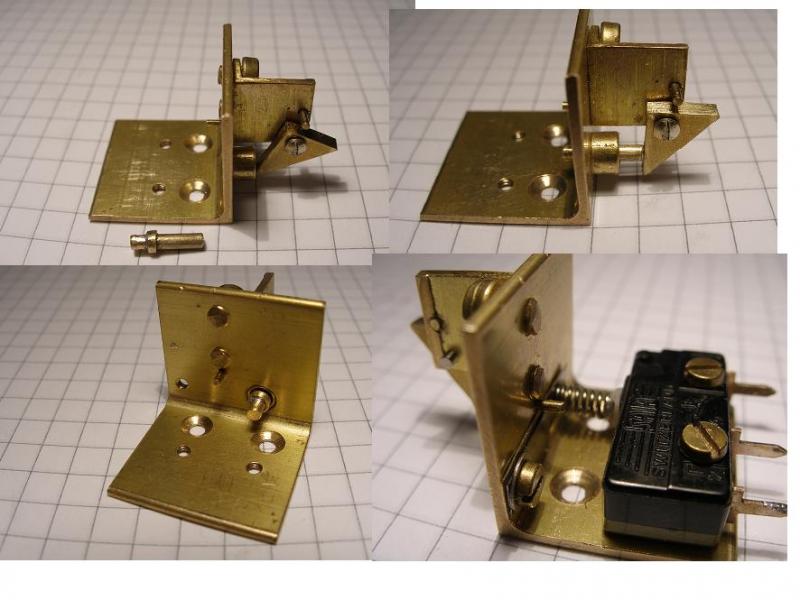
Zmieniłem nieco proporcje ramion trójkąta. To ramię, które popycha pręt jest dłuższe.
Zrezygnowałem z talerzyka (i mogę wyjąć pręt (już nie węglowy) z obudowy ). Ten pręt ma tulejkę, która
opiera się o blaszkę. Sprężystość blaszki wzmożona jest sprężyną od zegara (jak ktoś ma rosoli wzok
to wypatrzy na ostatnim zdjęciu po prawej ). Na blaszkę nałożona jest druga sprężyna, która utrudnia
zniszczenie wyłącznika krańcowego za złotych piętnaście. Do sprężyny dolutowałem odpowiednio
wyprofilowaną blaszkę, aby nie spadywała z wyłącznika za złotych piętnaście.
Teraz czekam na przeprojektowaną płytkę od Gury i ochoczo przystąpię do niszczenia tranzystorów
i wyłączników za złotych piętnaście.
Na płytce ma się pojawić dodatkowo sygnał od wyłącznika optycznego, ustawionego tak, aby sygnalizował
na 1mm przed krańcowką, że już koniec. W procesorze będę miał sumę logiczną tych sygnałów :
"wyłącznik krańcowy" OR "czujnik optyczny".
O efektach lub ich braku za poniedługo.
Z ukłonami
Andrzej Korycki
P.S.
Chciałbym podziękować Panu Zegarmistrzowi z ulicy Parkowej, który nieodpłatnie oddał mi swoją
ulubioną sprężynę od budzika o szerokości 3,5 mm.
Również, przemiła, Pani Zegarmistrz z ulicy Krzywoustego oddała mi sprężyny o szerokościach 3 i 5 milimetrów.
Program rewelacyjny, po prostu pierwsza klasa. Potrafi wiele.
Po pierwsze primo : znów rozwalił tranzystory, a po drugie primo
nadwyrężył wyłączniki krańcowe w kierunku opróżniania. O ile tranzystory mnie martwią mniej, bo tym już
się martwi Gura Procesorowa a jeden martwiący się to wystarczy w zupełności, to wyłącznik krańcowy
martwi mnie więcej, bo tym się martwię tylko ja.
Wyłącznik krańcowy wyglądał tak :
Poprzez trójkąt Teosa ( gdzie jest Teos ? ) popychany był pręt węglowy zaopatrzony w talerzyk i tulejkę
ograniczającą ruch. Wszystko to pchało blaszkę, która bezpośrednio atakowała wyłącznik krańcowy za złotych piętnaście (cztery razy tyle co tranzystor).
Jak tłok pojechał troszku dalej, to wyłącznik się rokraczał i już. Zresztą, przy takiej sile nacisku,
każdy by się rozkraczył (jak ta wrona).
Teraz zrobiłem tak :
Zmieniłem nieco proporcje ramion trójkąta. To ramię, które popycha pręt jest dłuższe.
Zrezygnowałem z talerzyka (i mogę wyjąć pręt (już nie węglowy) z obudowy ). Ten pręt ma tulejkę, która
opiera się o blaszkę. Sprężystość blaszki wzmożona jest sprężyną od zegara (jak ktoś ma rosoli wzok
to wypatrzy na ostatnim zdjęciu po prawej ). Na blaszkę nałożona jest druga sprężyna, która utrudnia
zniszczenie wyłącznika krańcowego za złotych piętnaście. Do sprężyny dolutowałem odpowiednio
wyprofilowaną blaszkę, aby nie spadywała z wyłącznika za złotych piętnaście.
Teraz czekam na przeprojektowaną płytkę od Gury i ochoczo przystąpię do niszczenia tranzystorów
i wyłączników za złotych piętnaście.
Na płytce ma się pojawić dodatkowo sygnał od wyłącznika optycznego, ustawionego tak, aby sygnalizował
na 1mm przed krańcowką, że już koniec. W procesorze będę miał sumę logiczną tych sygnałów :
"wyłącznik krańcowy" OR "czujnik optyczny".
O efektach lub ich braku za poniedługo.
Z ukłonami
Andrzej Korycki
P.S.
Chciałbym podziękować Panu Zegarmistrzowi z ulicy Parkowej, który nieodpłatnie oddał mi swoją
ulubioną sprężynę od budzika o szerokości 3,5 mm.
Również, przemiła, Pani Zegarmistrz z ulicy Krzywoustego oddała mi sprężyny o szerokościach 3 i 5 milimetrów.